Jose L. Agraz, PhD
PZT Linear Motors
PZT Linear Motor : Introduction
Abstract
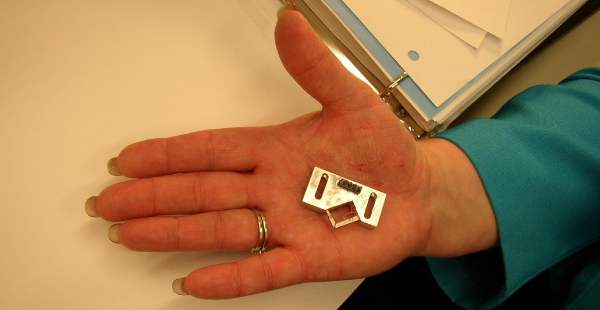
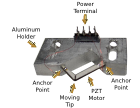
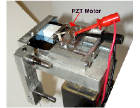
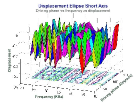
The goal of this work was to explore the motion interaction of two rectangular pieces of piezoelectric material joined at a 90° angle (Λ shape) and its functionality as a linear ultrasonic motor. Since the resulting combined motions of two exited piezoelectric material leads to elliptical and circular motion at the junction or tip, this motion translates into linear displacement of a load by friction. Several methodical designs were simulated using Finite Element Method (FEM) Atila software. Then, selected simulation designs displaying the largest displacement at the motor’s tip and smaller bandwidth between resonant frequencies (modes) were realized using piezoelectric (PZT) type 8H material. The frequency response, motion shape, load displacement, driving voltage, and number of driving inputs were tested for the realized design. The chosen motor design, elicited a 4.2 to 4.8KHz bandwidth between modes and an additional negative 6KHz bandwidth. The later allowed for larger pressures at the motor’s tip without loosing displacement because of frequency shifts between modes. This linear ultrasonic motor displayed elliptical motion of 7μm and 8μm at its minor and major axis, moving a 10oz Teflon load at a 1 cm / s being driven at 40Vpp. From this study, it was concluded that is possible to realize a Λ shape linear ultrasonic motor; estimating its load capacity based on tip displacement, motion shape, and driving voltage. Thus, using these factors, the ability of this ultrasonic motor to replace electromagnetic motor at certain applications could be easily estimated.
The Incredible Shrinking “Device”
Nearly two decades ago M. Weiser foresaw the increasing miniaturization of
technology, resulting in devices integrated into every day objects leading to the
disappearance of the personal computer. Although, Weiser’s ideas sounded
impossible at that time, today the large scale of miniaturization of every day devices is a
fact of life.
The high demand for smarter consumer goods continues to drive the development
of smaller foot print multifunctional linear piezoelectric (PZT) motors. Although
ultrasonic piezoelectric motors have been in existence for many years, electromagnetic
motors have been more successful. However, electromagnetic motor’s volume and
weight increases with a reduction of speed, and the total number of motors is equal to the
number of degrees of freedom (DOF), thus, greatly increasing the manufacturing cost at
very low displacements requirements. Hence, ultrasonic piezoelectric motors for
applications requiring motors smaller than 10mm are becoming more in demand. In
addition, the fast response, high precision, no backlash, high power to weight ratio,
absence of extrinsic or intrinsic magnetic fields, a much smaller package size of these
motors, and the characteristic of efficiency being insensitive to size have started a new
interest in the industry.
Linear Piezoelectric Motor
The Piezoelectric effect was discovered by the Curie brothers (Pierre and Jacques)
in 1880 and later the reversed effect by Lippmann in 1881. This effect was used mainly
to detect vibration in sensors such as microphones, speakers, and sonar. But it wasn’t
until the middle of the 20th century when efforts focused on producing piezoelectric
actuators and motors.
In 1968, H. Robertson patented the first Peristaltic or piezoelectric linear
motor, followed by designs from H. Barth in 1973 and W. May’s linear piezoelectric
PZT motor, or inchworm in 1975. But, it was not until 1986 that the market opened
up to ultrasonic motors by the introduction of the first propagating wave type
piezoelectric motors. Furthermore, Kurosawa in 1998 demonstrated
that a linear PZT motor using vibrators at right angles produced higher thrusts and speed
than previous linear motors.
Nevertheless, these PZT linear motors focus on large applications, and do not
quite address the demands of smaller applications such as cellular phones, digital
cameras, nano-positioners in optical fiber communications, and biomedical applications
The motivation of this project was to explore the simplest and least
expensive compact ultrasonic PZT motor, manufactured from bulk PZT where the
ceramic substrate aligner and the ultrasonic motor are co-fired simultaneously.
 Introduction
Introduction
 Literature
Literature
 Methods
Methods
 Results
Results
Feb 14th, 2015 at 5:09 pm