Jose L. Agraz, PhD
PZT Linear Motors
PZT Linear Motor : Methodology
Design Description
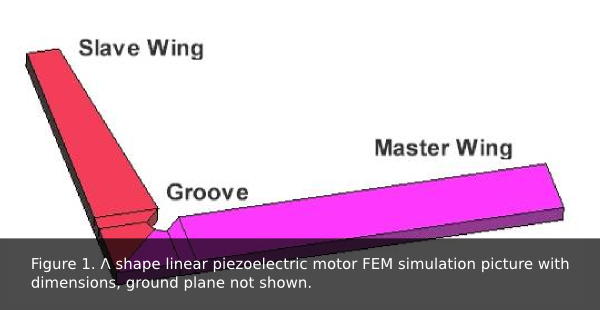
The selected design consisted of a thin piece of PZT 8H material cut at right angles, resembling the Greek letter “Λ”. The PZT wedge was then sandwiched between silver electrodes. Each side of the linear motor is called a wing. When the wings are cut asymmetrically, the larger wing is referred as the Greater Wing, while the smaller wing is referred as the Lesser Wing. By using the combination of two displacement modes in each wing, a new family of linear PZT motors was created
PZT material manufacturing
The Λ shape motor is primarily composed of PZT 8H material. Originally, the PZT material was in powder form, then, subjected to binder burn out, sintered, and cut into 1mm slabs, later cut into Λ shapes, and poled.
PZT Powder Conditioning
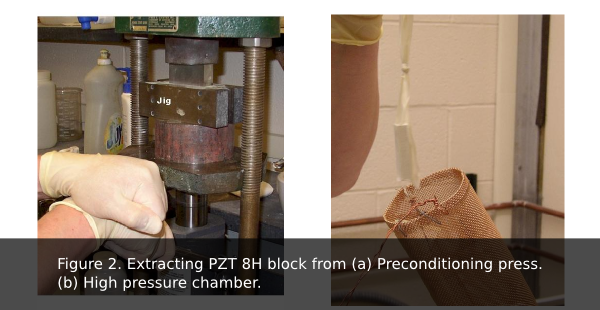
The PZT (Lead Zirconate Titanate) 8H material was chosen for its absence of hysteresis, its reliability, and its small actuation stroke. The PZT powder material was purchased from American Piezoelectric Company (APC841). Initially, the powder was preconditioned at 7K lbs/in 2 for two minutes into a block measuring 3x2x2 cm, then subjected to 30K lbs/in 2 for 10 minutes while in a weak vacuum Figure 2.
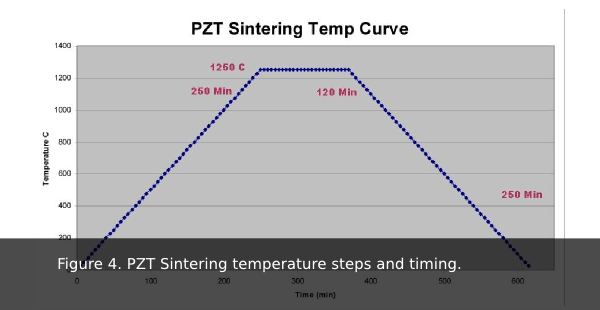
Powder Binder Burn off and Sintering
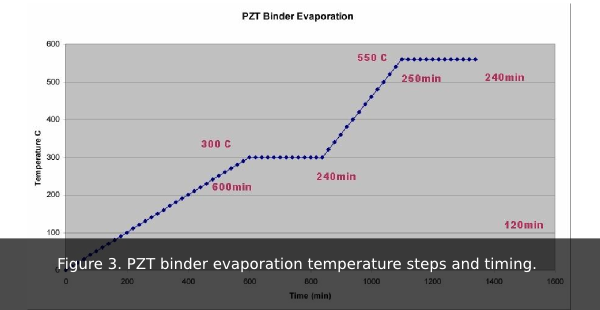
The resulting high density block of material was later subjected to a binder burn off that left 0.56% binder residue Figure 3, and sintering process Figure 4.
Bulk PZT cutting & Electroding
Once the material was sintered, the block Figure 5 was cut in 1.5mm thick slices which were later polished using 12.5μm grain polishing material into 1mm slices. Then, the motor dimensions were drawn on the 1mm thick slices; 2x2x14m for the Greater Wing, 1x2x10mm for the Lesser Wing, and a 1mm long notch as a stress relief. The motor was then cut with a wet saw followed by electroding using silver paste. The Dupont 6160 silver paste was painted on the motor’s wings using a thin paint brush. The electrode paste dried for 10 minutes at 120C, and postfired at 850C for 45 minutes.

PZT material poling
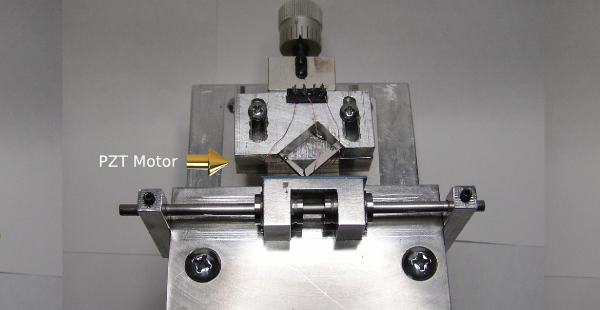
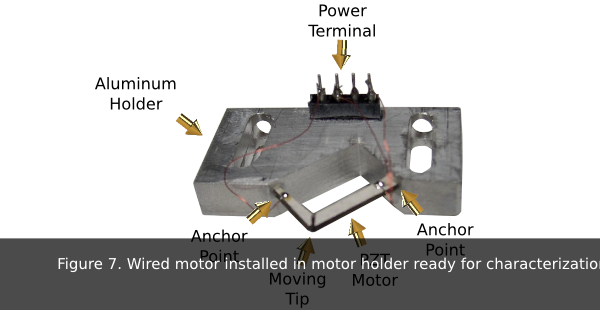
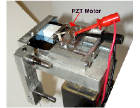
Each motor was polarized in an oil bath at 120C at 3kV for 30 minutes in the thickness direction, and copper wires were soldered using low temperature silver solder on each wing and the underside of the motor used as common ground. Then, the motor was installed on the motor holder using Loctite® Quicktite® instant adhesive (Cyanoacrylates) on the wings’ ends Figure 7.
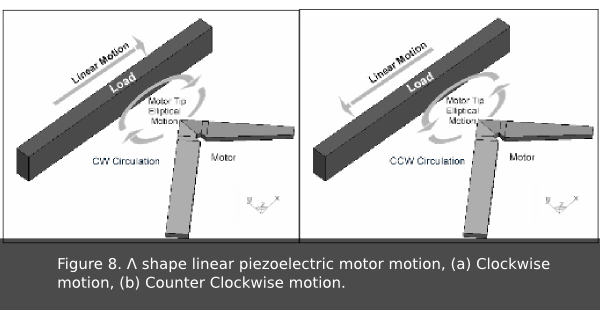
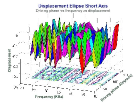
Motor tip displacement
The combined motion of the two wings of excited PZT material resulted in elliptical and circular motion at the junction or tip. Although, not proven, it is believed that bidirectional motion can be achieved by exciting the wings at different phase shifts producing a clockwise or counter clockwise motion at the tip Figure 8. However, only clockwise motion at the tip data is reported. This elliptical motion of the tip translates into linear motion of a load by friction at the tip of the motor. The loading characteristics, driving voltage, number of input phases, acceleration, velocity, and motion shapes at the tip are determined by the motor’s wing dimensions. The total displacement was increased by cutting a stress release notch opposite to the motor’s tip.
 Introduction
Introduction
 Literature
Literature
 Methods
Methods
 Results
Results
Feb 14th, 2015 at 5:09 pm